
Steppability
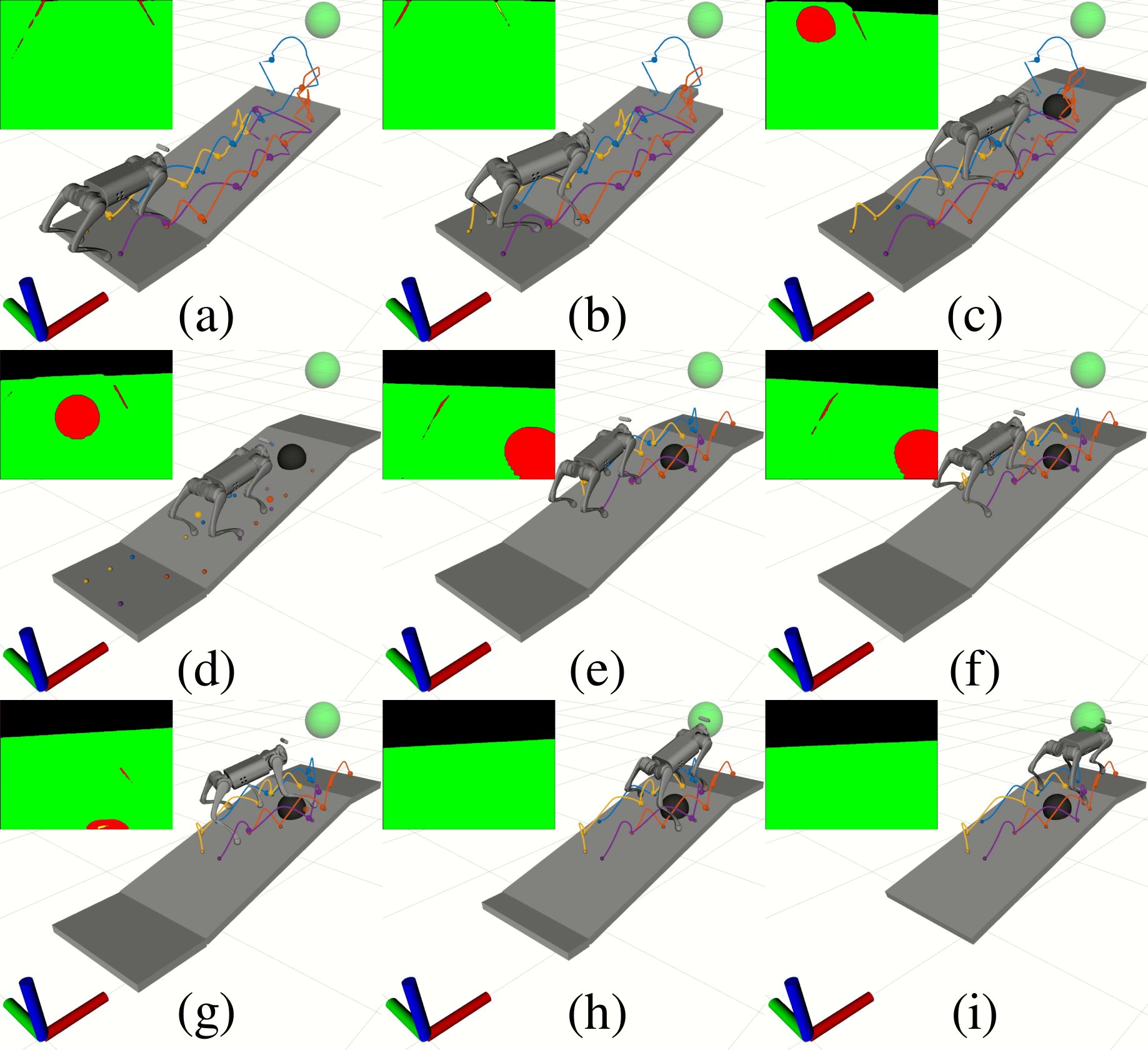
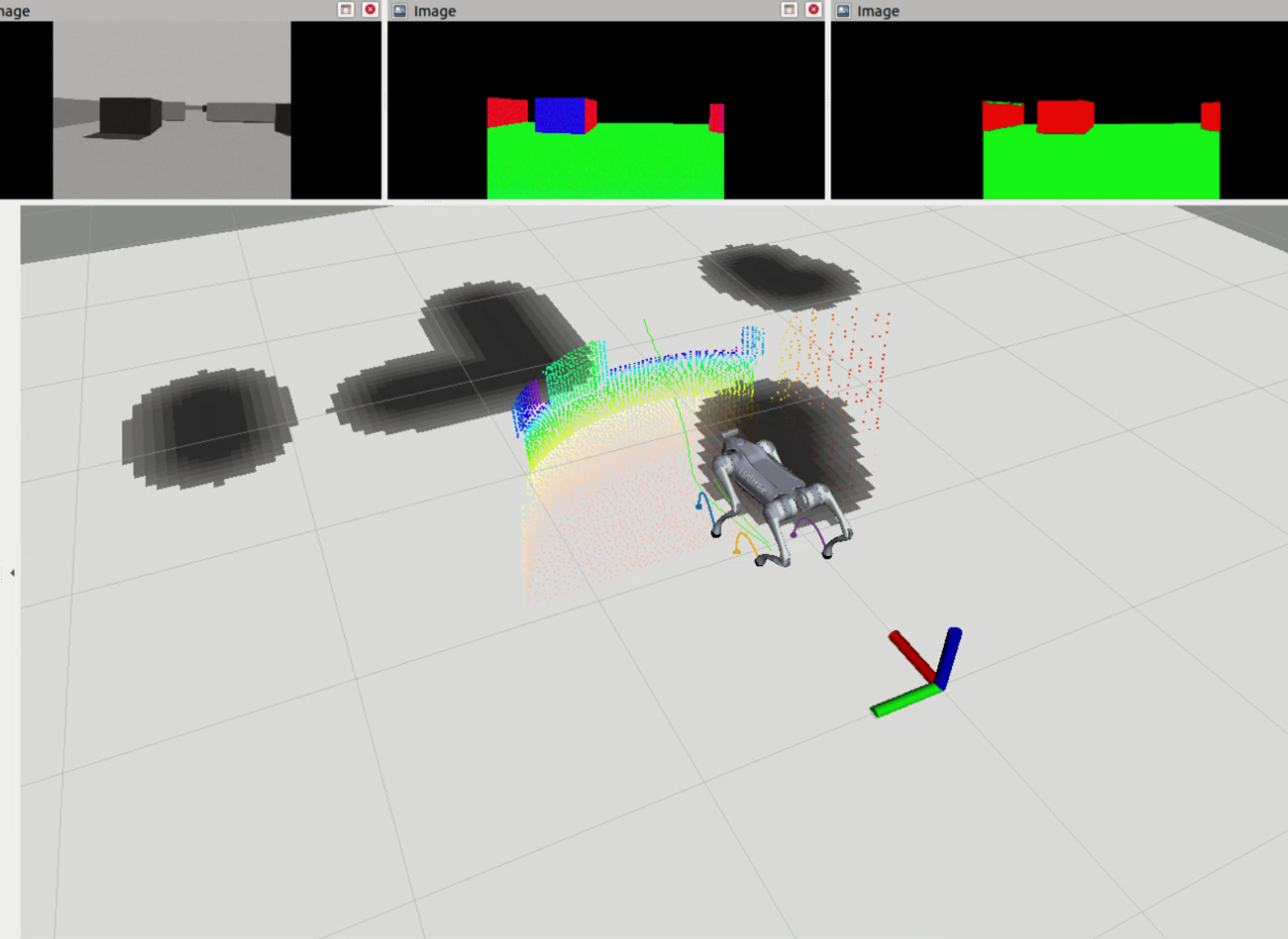
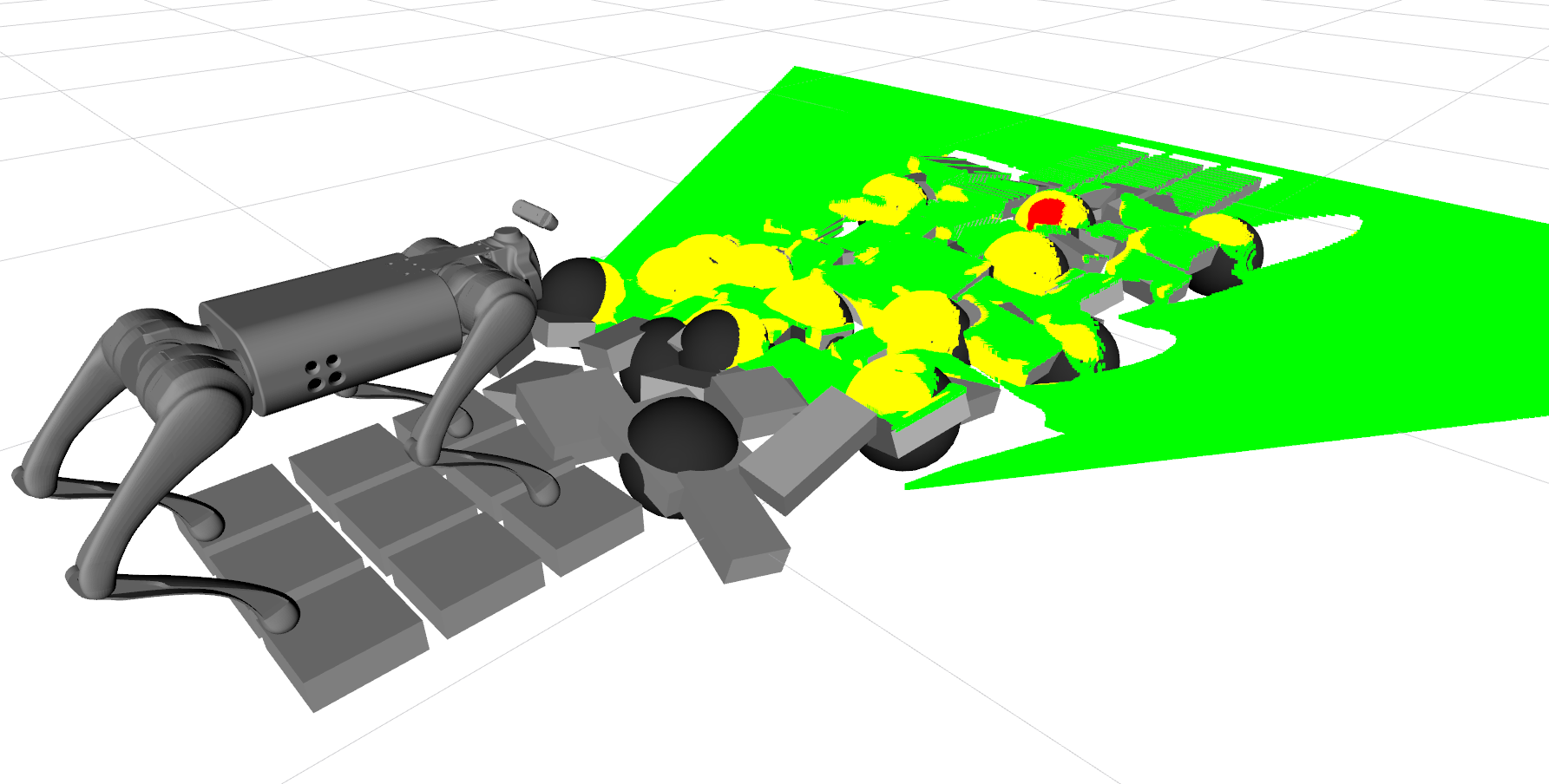
A crucial element in the legged planning pipeline is determining where in our local environment we can plan footsteps.
Often, this is accomplishing through classical point cloud processing approaches such as RANSAC, region growing, etc. However, when you are running onboard hardware and need to operate in realtime for tasks like footstep planning, these point cloud-based approaches can bottleneck your framework and limit your ability to plan reactively.
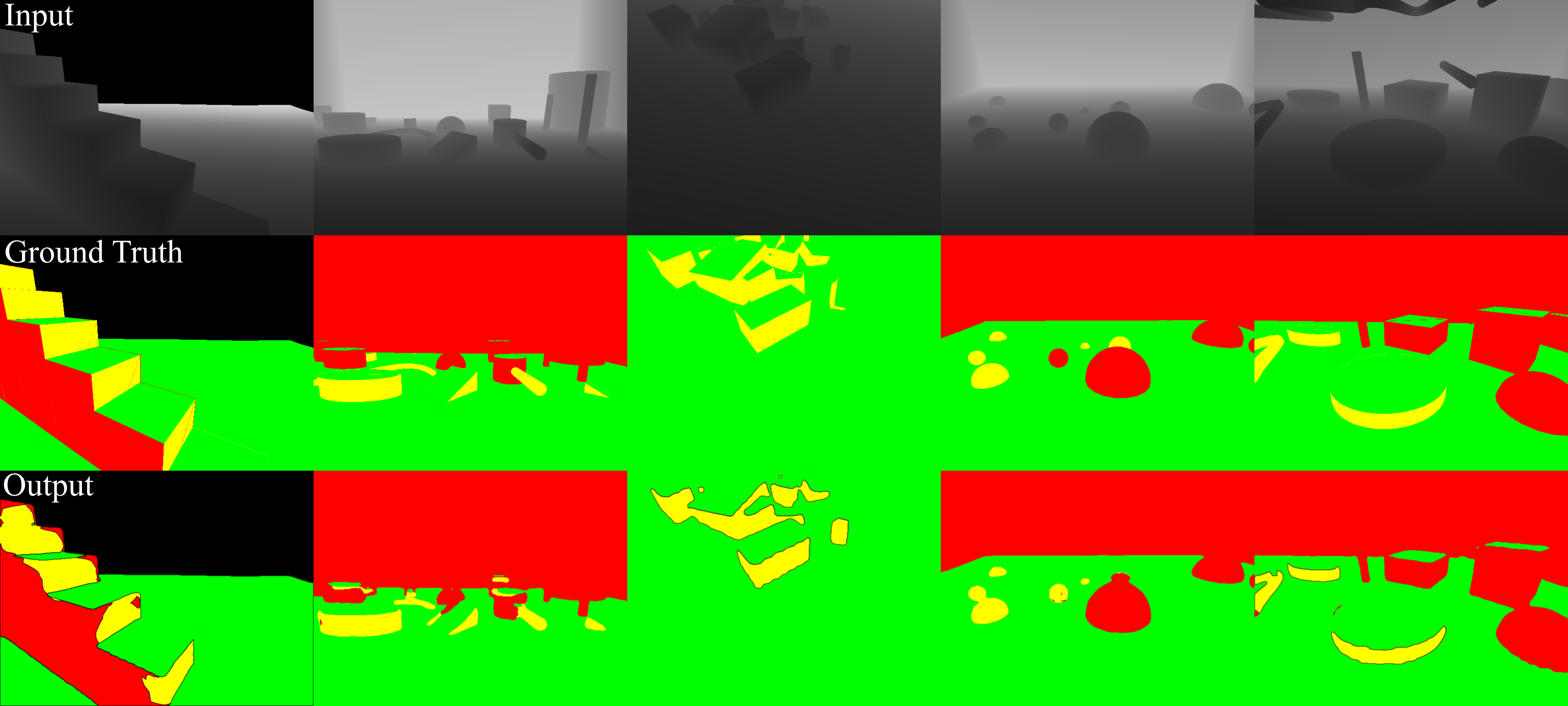
With this work, we are investigating if this task of local environment steppability evaluation can be accomplished through a learned approach where we bypass the expensive point cloud processing step and instead treat it is a segmentation task.
Want to learn more? Check out the following links: