
Multi-modal Footstep Planning
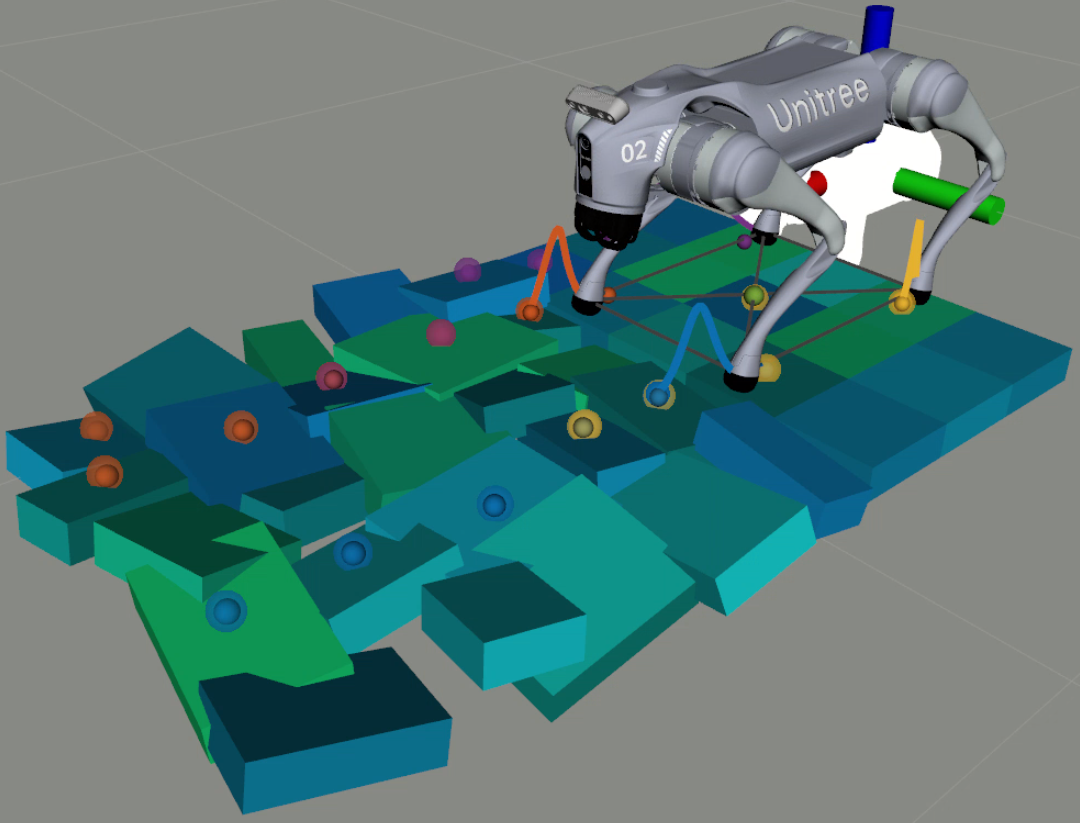
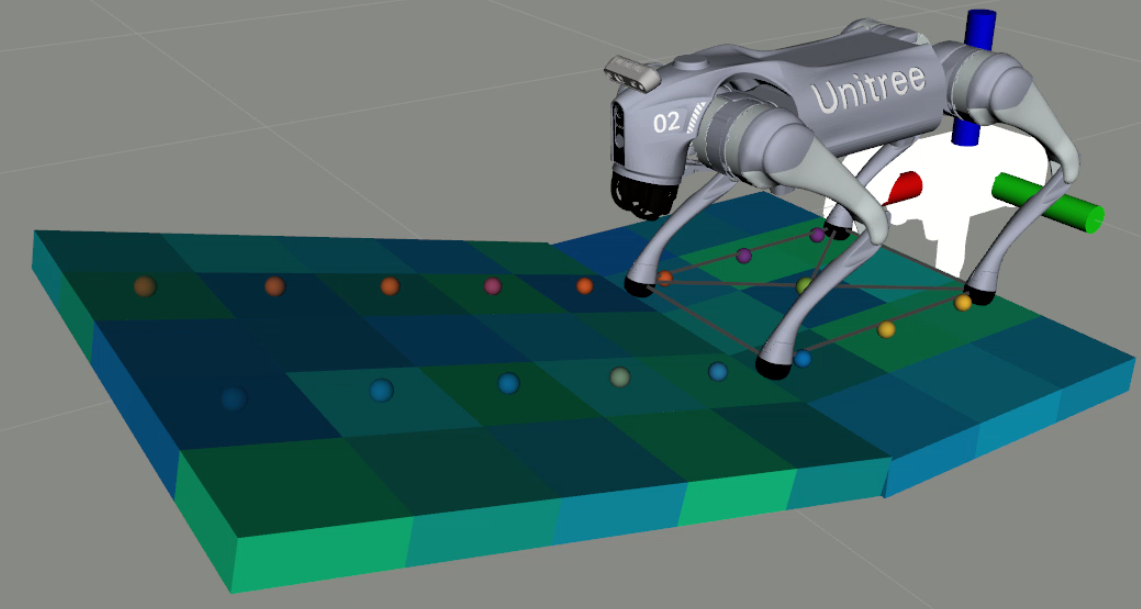
Footstep planning is fundamentally a hybrid planning problem: we must choose a discrete set of footstep locations (and often times a discrete set of regions that these footsteps are placed upon) while also synthesizing continuous trajectories that enable the robot to transition between these footsteps.
You can attack this problem through many ways: pure search, pure optimization, or, as we did, a combination of these two approaches. This allows us to cater the benefits of search to the discrete planning problem and the benefits of optimization to the continuous planning problem.
When you choose to take a hierarchical approach such as this, you must then also make considerations about how your different hierarchy levels will coordinate. To provide some synergy and integration between these two planning levels, we adapt the concept of offline experience.
Want to learn more? Check out the following links: